

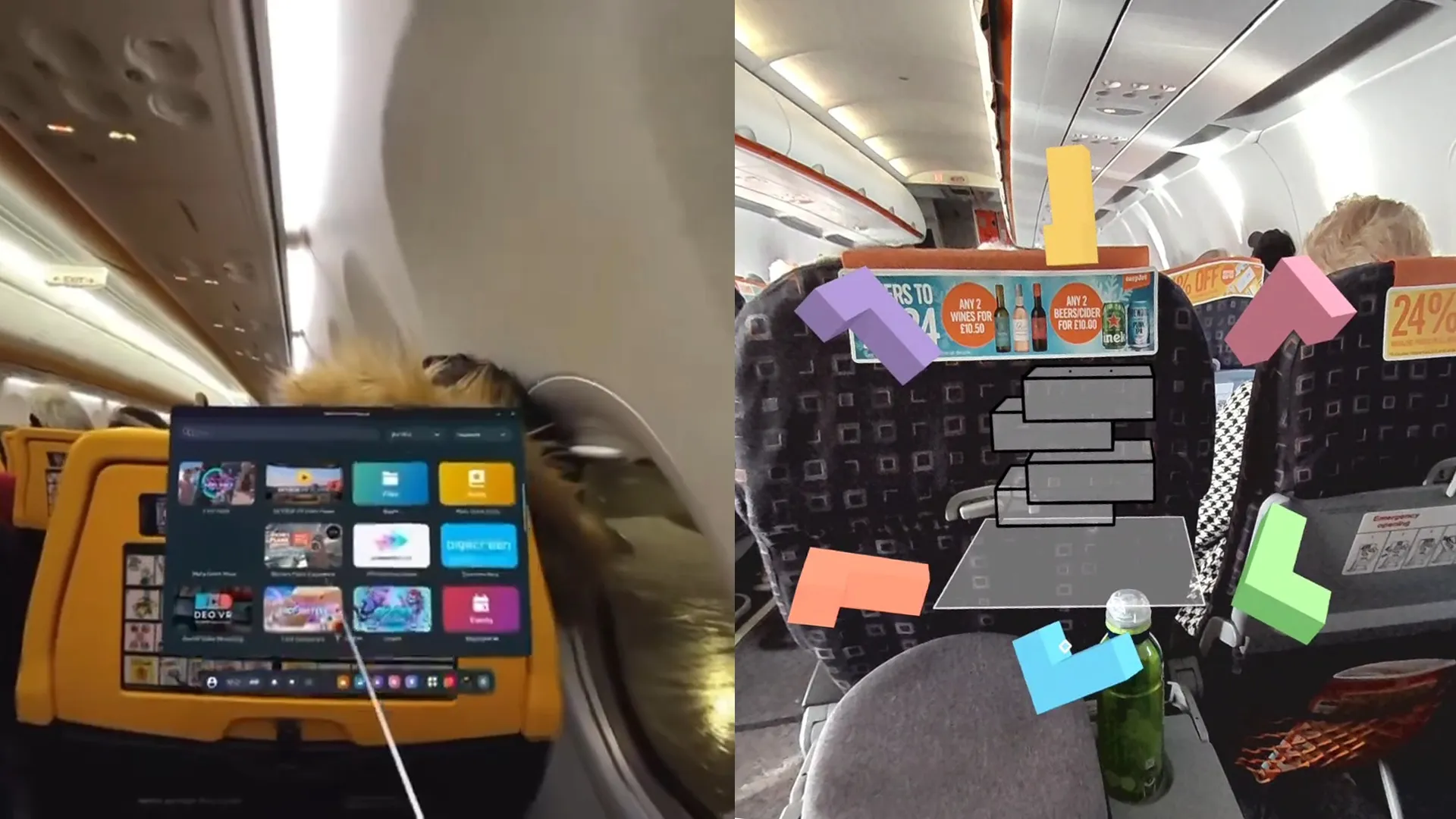

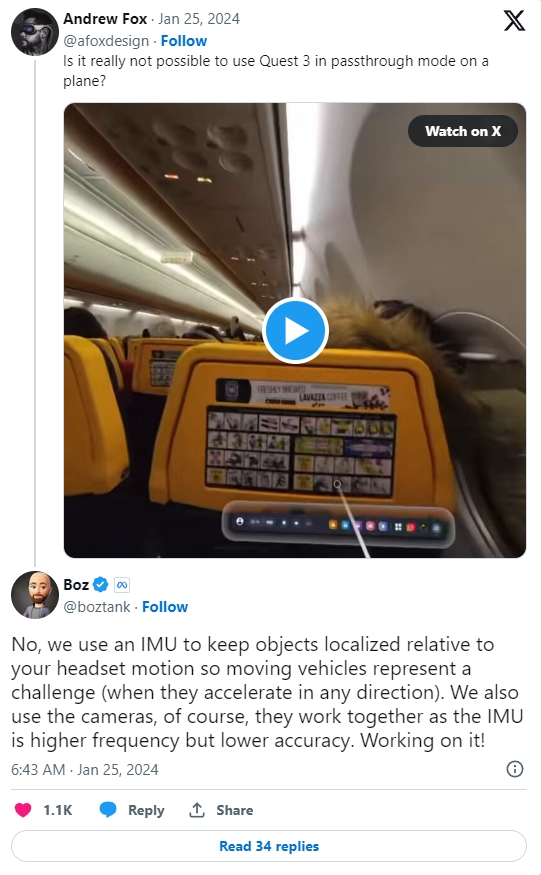
UX 设计师 Andrew Fox向推特转发了一段Facebook 用户 Netsvietaiev Oleksandr尝试在飞机上以透视模式使用 Quest 3 的视频,但由于界面偏离而无法使用。
Meta 的首席技术官 Andrew Bosworth回复了该帖子,总结了发生这种情况的原因,并最后表示 Meta 正在“努力解决这个问题”。
那么,为什么头显会在行驶中的车辆发生漂移呢?
人们通常认为头显、眼镜和自跟踪控制器上的无标记由内而外跟踪系统仅使用摄像头,但事实并非如此。这些系统同样依赖于惯性测量单元(IMU),这是一种包含微型加速度计和陀螺仪的芯片。
虽然相机通常以 30Hz 或 60Hz 运行,但 IMU 通常提供 1000Hz 左右的更新,从而实现更低的延迟。然而,IMU 实际上无法检测绝对运动 – 至少不能直接检测。IMU 中的加速度计感测相对于重力的加速度,并且您可以对加速度随时间的积分来获得速度。然后,如果您对这些速度值随时间的积分进行积分,就会得到相对于原始位置的位移。
这个过程称为航位推算。每时每刻,每个头显和控制器都是这样跟踪自身的,而相机或激光基站等光学组件仅用于纠正由 IMU 数据噪声引起的累积误差。但在飞机等移动车辆中,加速计会检测车辆本身的加速度,并认为这是头显加速度,这会导致在上面的视频中看到的突然而快速的位置漂移。
目前还不清楚 Bosworth 所说的 Meta 正在“解决”这个问题到底是什么意思。
目前可以在 Quest 上禁用 6DoF 位置跟踪,并且头显将回退到仅 3DoF 旋转跟踪,但这也会禁用透视模式。因此,Meta 可能计划在禁用位置跟踪时允许通过。
或者,Meta 可能正在努力以某种方式在移动车辆中进行位置跟踪,也许是通过指示系统完全依赖相机视觉效果并忽略 IMU。去年,Meta展示了一个研究项目,让 Quest Pro 在行驶中的宝马中工作,但这涉及到与汽车自带的车载 IMU 的接口。
与此同时,Apple Vision Pro 具有可在飞机上使用的旅行模式,并且苹果已经营销了此使用场景,但目前尚不清楚苹果的旅行模式到底有什么作用。
参考:uploadVR
